以下文章来源于极端制造 IJEM ,作者Editorial Office
外伤或骨关节炎等退行性病变引起的关节软骨损伤可导致严重的疼痛、行动不便和残疾。目前的手术治疗效果有限,长期治疗效果不佳。三维生物打印(3D bioprinting)旨在通过高度还原原生组织微环境,修复和再生受损组织,已被广泛研究和运用。但传统的体外生物打印 (in vitro bioprinting)因其制造方式局限,难以与原生组织有效整合。而原位生物打印(in situ bioprinting)作为一种可以将生物墨水直接打印到解剖部位的新型打印方式,受到了业界广泛的关注。
近期,新加坡南洋理工大学3D 打印中心 Paulo Bartolo教授团队在SCI期刊《极端制造》(International Journal of Extreme Manufacturing, IJEM)上发表题为《Robotic in situ bioprinting for cartilage tissue engineering》的综述,系统地介绍了机械手臂式原位生物打印的研究进展及其对未来软骨组织应用的展望。
 论文链接:
论文链接:
https:/doi.org/10.1088/2631-7990/acda67
![]() 亮点
亮点
原位生物打印的打印方式总结:
- 微创/无创和机器臂辅助手术技术对机械手臂式原位生物打印应用中的作用及意义;
- 微型和纳米机器人在软骨方向的应用;
- 机械手臂式原位生物打印的挑战及未来展望。
![]() 研究背景
研究背景
三维生物打印通过3D打印技术,生物材料,细胞和多种细胞因子,可以用来修复或者再生受损人体组织。如图1所示,体外生物打印通常将细胞封装或种植于生物材料基质中或者表面,然后通过3D打印的方式,制备出具有复杂结构的组织工程支架。这些支架经过生物反应器的培养,随后植入手术部位。但是,这种打印方式存在复杂创面修复难、与原生组织整合难, 预植入前处理复杂等问题,制约了其在临床方向的应用。相较于体外生物打印,原位生物打印可以精确且快速地在伤口创面上使用特定组织生物墨水,并且根据伤口尺寸进行实时打印,从而有效地避免了缺损以及伤口创面进一步地恶化。更重要的是,这种打印方式可以有效解决支架与原生组织吻合的问题。
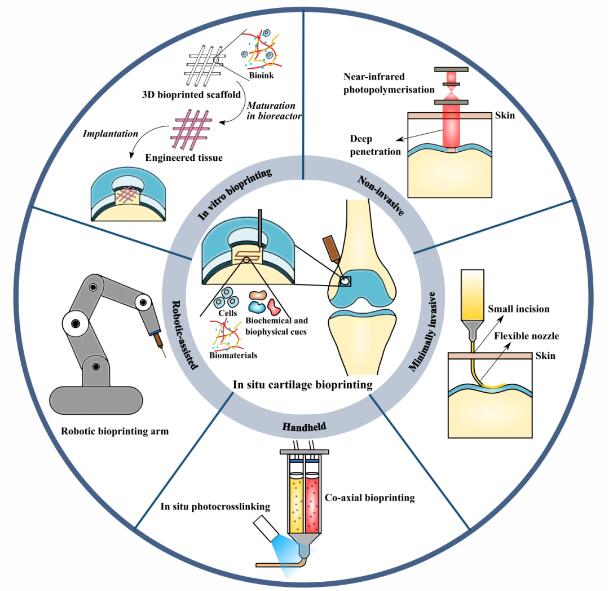 图1 多种用于软骨组织修复的生物打印方式。
图1 多种用于软骨组织修复的生物打印方式。
![]() 最新进展
最新进展
1. 原位生物打印的打印方式(In situ bioprinting approaches)
原位生物打印主要分为手持式和机械手臂式两种类型。手持式原位打印可被认为是一种简化的准3D生物打印方式。由于操作简单,携带方便,通过外科医生手动操纵,该方式可以用于急性创伤和探索性手术(例如,关节镜检查)。这种方式价格低廉,操作易上手,但应用场景更加适合诸如皮肤或肌肉等可触及的伤口创面以及在侵入性的开放手术中使用。
机械手臂式原位生物打印则通过构建缺陷或创面图像,设计及预定义CAD 模型及打印路径,在外科医生的调整和监控下,使用机械手臂实现高精复杂3D器官或组织的打印。该系统的核心要素包括高分辨率3D扫描仪、生物打印单元(例如挤压和喷墨打印头)、具有 3 个或更多自由度的机器臂操纵器(例如笛卡尔、平行或铰接式)、控制和监控设备以及操纵平台。而系统的组件必须能够在复杂的手术环境中运行,例如易于消毒、可移动且操作简单。目前,原位生物打印还处于实验室研发阶段。并且,相较于皮肤或者肌肉组织修复,原位生物打印在软骨方向的应用更加稀少。其中关键的原因之一是病变位置的需要准确定位以及病变位置周围复杂结构导致进入困难。所以,这需要原位打印具有高精度可视化,多材料,以及构建分层结构的能力(图2a)。同时,高自由度,打印路径规划,算法以及降低校准误差对于构建复杂曲面也十分重要(图2b-d)。
原位生物打印结合微创或无创技术可以有效避免开放式手术带来的并发症。虽受到广泛关注,但微创和无创打印还处于早期研发阶段。这是因为刚性或者半刚性的3D打印喷嘴增加了微创手术的难度,并且容易造成二次创伤。因此,使用灵活或者柔性的机器人系统(例如, 铁磁软导管机器人)或者使用数字近红外的光聚合技术,是非常有效的替代策略。到目前为止,还没有相关技术运用于软骨再生的报道。
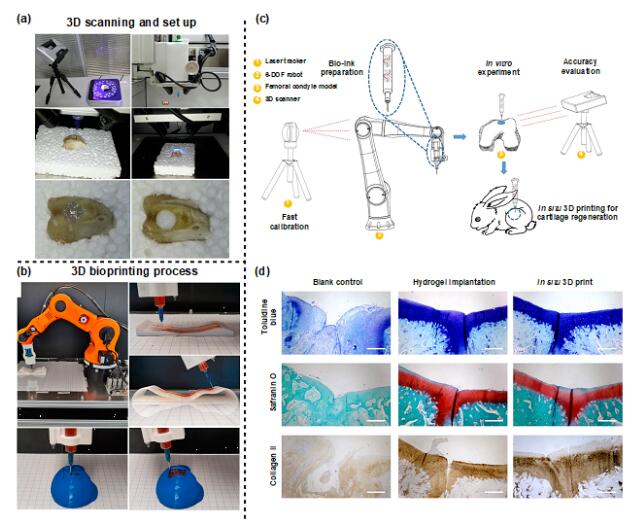 图2 (a)机械手臂式原位打印集成三维扫描设备支持多材料分层结构打印;(b)机械手臂打印复杂非平面曲面;(c)机械手臂式原位挤压打印在动物模型上的软骨应用实例;(d)打印植入物组织学结果。
图2 (a)机械手臂式原位打印集成三维扫描设备支持多材料分层结构打印;(b)机械手臂打印复杂非平面曲面;(c)机械手臂式原位挤压打印在动物模型上的软骨应用实例;(d)打印植入物组织学结果。
2. 微型和纳米机器人在软骨方向的应用(Micro- and nanorobotic cartilage therapies)
微型或纳米机器人尺寸小,可以用非侵入方式进入人体狭窄和复杂区域,并进行相关操作。这些微型机器人可以被精准驱动并完成相关任务,例如,作为载体输送细胞或者药物(图3a-b),也可以作为原位生物打印的补充手段,在非侵入性手术治疗中发挥巨大作用。当然,微型机器人在软骨修复或者再生领域也面临着诸多挑战。作为多相组织,软骨基质中的固体成分,间质液,软骨下骨及周围滑液构成致密复杂结构,给微型机器人的运动带来了挑战(图3c)。
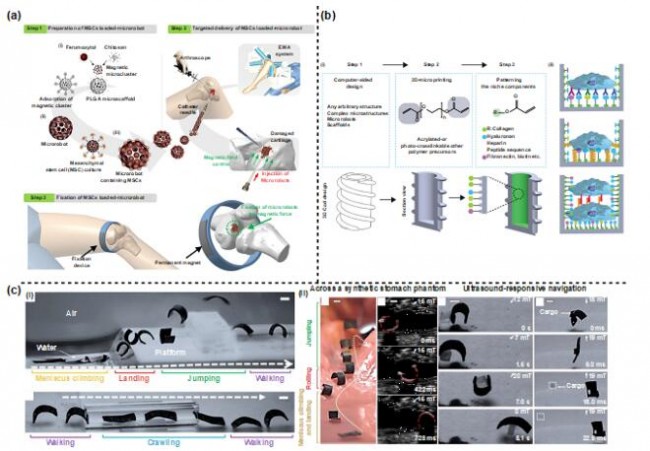 图3 (a)磁性微型机器人介导的干细胞输送系统;(b)微型机器人输送系统的制造以及细胞封装;(c)软体机器人的多模态运动。
图3 (a)磁性微型机器人介导的干细胞输送系统;(b)微型机器人输送系统的制造以及细胞封装;(c)软体机器人的多模态运动。
![]() 总结及未来展望
总结及未来展望
机械手臂式原位生物打印系统的高度自动化,精确化可以有效减轻外科医生的工作量。此外,与现有的机器人手术系统相结合,特别是集成微创或无创技术,成为末端执行工具套件的一部分,能让这项技术更快地被应用。当然,在开发特定性质的生物材料方面(例如,诱导细胞生长、细胞表型稳定,组织吻合,具有适当的生物力学特性),仍然存在挑战。此外,机器手臂和打印系统也需要进一步的改进,以便实现运动,控制,反馈,手术工具以及可视化设备的小型化。值得注意的是,原位生物打印并不适用于所有临床适应症,是否使用取决于组织或器官的复杂程度、解剖位置和所需的临床结果。并且为了实现临床转化,需要在临床试验的同时开发标准化的生物打印程序,以确保与当前黄金标准相比,拥有更好的效果和成本效益。此外,作者认为原位打印技术不应该是独立发展或者与外科技术的发展脱钩,而应该与临床团队及相关学科紧密合作,结合包括人工智能(AI)、物联网(IoT)、虚拟现实(VR)、增强现实(AR)和5G等一系列新兴技术,成为高度跨学科的领域。
论文引用信息:
Wang Y X, Pereira R F, Peach C, Huang B Y, Vyas C, Bartolo P. 2023. Robotic in situ bioprinting for cartilage tissue engineering. Int. J. Extrem. Manuf. 5 032004.
l 谷专栏 l
欢迎高校及科研机构、企业科学家加入谷专栏,与业界分享对推动增材制造发展起关键作用的共性基础科研与应用成果,欢迎扫描下方图片二维码提交您的信息。
白皮书下载 l 加入3D科学谷QQ群:106477771
网站投稿 l 发送至2509957133@qq.com
欢迎转载 l 转载请注明来源3D科学谷 l 链接到3D科学谷网站原文