3D打印技术在制造复杂的特殊机器人方面发挥了重要作用,例如,哈佛大学的科学家开发的柔软而灵活的软机器人Octobot,机器人柔软的身体中的每一个功能部件都是由3D打印技术制造的,Octobot机器人展示了研发团队的综合设计能力以及功能嵌入式的3D打印技术。
美国加州大学圣地亚哥分校也利用3D打印技术制造了一个功能特殊的机器人,机器人的“腿”是在经过特殊设计后由3D打印制造的,具有可多角度弯折的柔软性和灵活性。
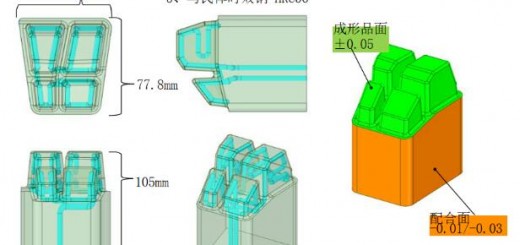
腿部可向多个角度弯曲
加州大学圣地亚哥分校研发的这个机器人可以像真正的动物一样,灵活的爬进狭窄的通道。它的四条腿能够呈现“X”形状,可以在步行、爬坡和爬行动作之间交替。研发机器人的科研人员表示,机器人可以向前和向后移动,并且可以侧向旋转和移动,而不需要使用任何传感器来“观看”外部环境。机器人的移动速度大约每秒20毫米。

当机器人爬过一堆鹅卵石时,它的“腿”可以平稳的行动,并进行采样。科研人员表示,该机器人能够可靠地穿过不同物体表面,并能够实现一些难度比较高的动作,比如说使身体灵活绕过那些未知环境中的障碍物,而这种独特的能力得益于精巧设计和3D打印的腿。
通常,动物的腿关节只能向一个方向弯曲,机器人的腿也往往是只能向一个方向弯曲,这种方式在设计和制造时相对容易实现。但是当人们希望机器人的腿部变得更加灵活,能够向任何方向弯曲时,就会给设计和制造带来难度。而如何将这个目标实现出来,是加州大学圣地亚哥分校研究团队需要解决的问题。
研究人员首先以数字化的方式对机器人腿部进行建模,并对机器人在不同表面中所做的行为进行分析和预测,如柔软表面、沙质的表面、岩石表面以及鹅卵石表面。
最终,研究人员为机器人设计了一个由三个螺旋管连接而成的腿,在制造时使用了3D打印设备,以及柔性和刚性两种不同材料。3D打印的机器人腿部是空心的,可以进行充气,其活塞的膨胀量和排列量将决定机器人的步态。
加入3D科学谷3D产业链QQ群:529965687
查找往期文章,请登陆www.51shape.com,在首页搜索关键词
网站投稿请发送至editor@51shape.com
欢迎转载,如需加入白名单请将微信公众号回复至3D科学谷微信公众号