机器人与3D打印将在制造业和全球经济的未来发挥重要作用,然而机器人与3D打印之间发生了趣味的关系。印第安那大学的研究人员通过3D打印技术提供了机器人自动化和远程操作更有效的解决方案。
印第安那大学的Anna Eilering, Giulia Franchi 和 Kris Hauser创造了直观地控制各种不同类型的机器人的一个经济实惠的方式,控制方式通过安装3D打印制造出来的机器人臂称为ROBOPuppet。目前,机器人远程操作有许多重要的应用,尤其是应对危险环境的核设施,搜索和救援,去除爆炸装置以及机器人手术试验,这种远程技术适用的范围还在继续扩大。
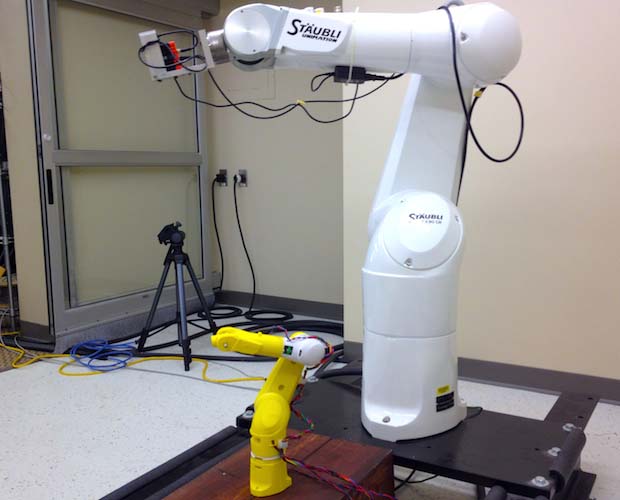
目前的机器人操作界面包括操纵杆或者键盘等控制器,当远程控制的时候经常发生混乱的信号导致不够精确的动作出现,印第安那大学的解决方案就是针对这一问题的。
会思考的机器人-Baxter允许用户通过移动它来自动程序,其运动的物理轨迹通过编码器来记录,使得操作人员无需编程背景或懂机器人操作。
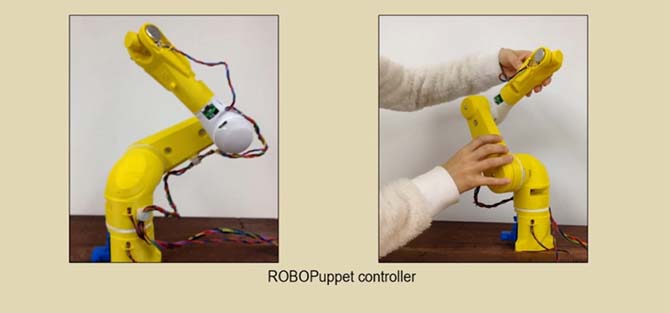
ROBOPuppet基本上是一个实时版Baxter,可定制,仅需要35小时即可完成,其中3D打印需要29小时,机器人通过Makerbot打印,总费用大约是85美元,而主要成本并不是机器人,而是微控制器Arduino UNO microcontroller。
这意味着任何人可以在家里面打印ROBOPuppet,并且有能力创造自己想要的ROBOPuppet。
该项目的网站提供了一个详细的列表包括如何建立应用软件和硬件来制造属于自己的ROBOPuppet:
-下载目标的机器人的CAD模型
-检查各接合面,确定吃讯
-按预定尺寸创建CAD模型
-修改机器人的网格允许联合编码器组件的安装以及任何额外的硬件访问。
-打印ROBOPuppet
-清洁打印模型和修正支撑结构。
-安装接头处的控制器组件。
-组装的ROBOPuppet
-安装螺栓等零部件
-运行线路
-测试编码器和组件。
(3D科学谷编译自3dprint, 欢迎转载并链接至:www.51chape.com)