近日,哈尔滨工业大学重庆研究院先进陶瓷及智能制造研究中心的科研团队在柔性机器人3D打印上取得新突破。
研究指出,通过3D打印技术结合墨水干燥收缩干预,制备出具有湿度敏感特性的柔性3D机器人,可实现在湿度控制下的自由爬行,并且无需电力供应。这些墨水干燥收缩设计可在纳米尺度上产生巨大毛细管力,促使石墨烯纳米片处于高度致密化和定向排列,而且还可保持宏观设计结构的均匀性。

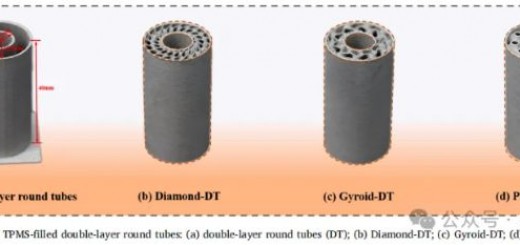
该研究发现,3D打印纳米墨水在干燥过程中收缩应力逐渐增加,最大值超过~0.74 MPa,显著高于其他胶体体系。由于墨水具有不同约束方向的收缩,可在拐角处自然形成沿厚度方向的孔隙率梯度,这种孔隙梯度使氧化石墨烯结构具备湿度敏感特性,从而使3D打印湿度驱动氧化石墨烯软体机器人成为可能。
 该项研究成果已在纳米科学期刊ACS Nano上发表。
该项研究成果已在纳米科学期刊ACS Nano上发表。
团队负责人杨治华教授介绍,常规柔性机器人都是压力驱动或者电子驱动,这种驱动模式都需要能源供应限制,无法全天候全时长执行各种动作,而依靠环境湿度变化驱动的柔性机器人属于无源驱动,相比传统电力驱动机器人,它可以有限减少能源限制,提供更多场景应用。
他表示,目前,团队通过新型纳米悬浮液的定向排列,已实现3D打印成型特性上的各项异性,成功实现了微米级高精密电路的快速3D打印制造,大幅度提升了电路成型精度和效率,有望应用在微波通讯天线等领域。该项技术已完成专利写作即将完成专利申请,下一步将进行实际应用研究和产业化探索。
白皮书下载 l 加入3D科学谷QQ群:106477771
网站投稿 l 发送至2509957133@qq.com
欢迎转载 l 转载请注明来源3D科学谷 l 链接到3D科学谷网站原文。